

Collaboration
Research on Machine Vision and Control System for Photovoltaic Operation and Maintenance Robots
The project is based on machine vision technology, real-time detection of solar panel borders and array edges, combined with other sensing units, real-time identification of pathways between panels and arrays or on a single side of the array, site markers, search array edge determination device and its determination methods, to achieve pathfinding, obstacle avoidance and interface with the array connection point of the feeder robot. Implementing a control system for a connected robot based on machine vision technology, including a processing unit for machine vision and other sensing devices, a travel control unit, a lifting platform control unit, a communication unit, and hardware secrecy and software protection measures.s
Development of Real-time Target Monitoring Technology Based on Machine Vision
Cooperating with a military, the system detects and stably tracks ships, aircraft, XX and other targets in the sky, sea and other natural background environments in real time from white light and infrared images, and calculates physical information such as target size, speed and orientation based on relevant information. The system contains three functional modules: target detection, target tracking and target physical information acquisition.
Robot Vision Localization and Navigation Techniques in Unstructured Scenarios
For active vision and robotics applications, we study the perception, map construction, and navigation control tasks of autonomous mobile robots based on machine learning, focusing on the following research questions: (1) Image pair-based visual odometry approach; (2) Effective visual feature extraction for navigation tasks; (3) Reinforcement learning approach incorporating deep learning; (4) Input dimensional disaster problem in autonomous mobile robot navigation.
Sweeping Robot Vased on Visual SLAM
The development of visual positioning and navigation technology for sweeping robots in home scenarios, including the realization of visual SLAM algorithm; the realization of full coverage of sweeping in the home environment based on visual positioning and navigation technology; the realization of remote control and real-time display of sweeping trajectory and the evaluation of sweeping coverage on APP.
Research on Robot 3D Target Recognition and Tracking Technology Based on Depth Information
It realizes the capture, tracking and real-time positioning of the high-speed moving target, judges the target position through photoelectric or image recognition method, automatically tracks the high-speed moving target using high-speed real-time feedback system, and can physically interact with the high-speed moving target.
Cooperative Research and Development of Key Algorithms and Software for Robotic Monocular 3D Vision Guidance
A set of robot vision assistance system for industrial robot monocular 3D vision guidance is developed, which can rely only on a common CCD camera to achieve the identification of scattered parts in the unstructured environment, spatial positioning, as well as the industrial robot 3D guidance. The system is mainly used for 3D robot guidance of the industrial field of three-dimensional scattered parts of the automatic sorting work. The vision assistance system needs to have good compatibility with the mainstream industrial robot control system and achieve reliable and stable motion control of mainstream industrial robots; it needs to have certain adaptability to different kinds of parts within a certain range in the industrial field.
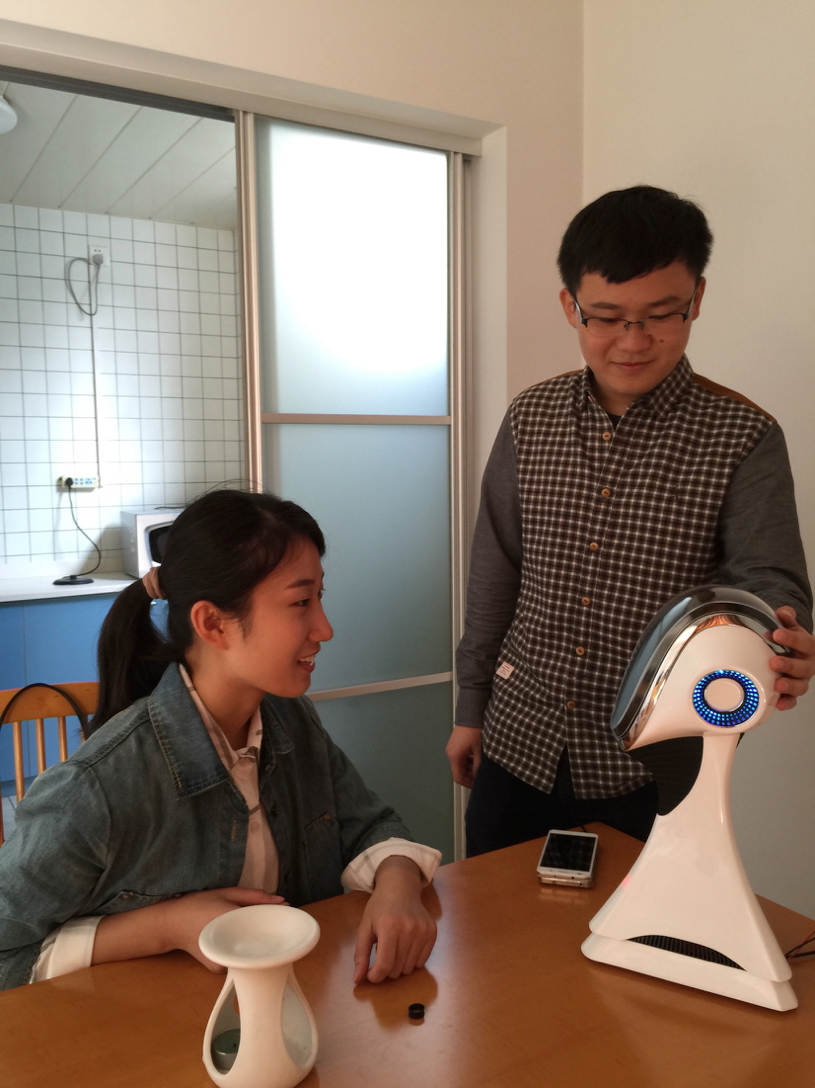
Cloud Chinese Medicine Smart Mirror
Provide facial diagnosis, tongue diagnosis, inquiry, pulse diagnosis and smell diagnosis of the detection realization. Pulse diagnosis requires an external ring sensor, and it can monitor blood pressure, heartbeat and pulse in the same time. Integrate the results of syndrome differentiation and physical type of the eight principles and professional health management Suggestions, including daily life, diet, exercise, music, common Chinese patent medicine, disease early warning and other contents, and provide links to medical resources.
Intelligent Auxiliary Diagnosis System Based on Audiovisual Cognition
To realize the intelligent diagnosis and treatment assistant system for general practitioners, the main development contents are as follows: an intelligent surface inquiry and evaluation system based on the four diagnostic methods of Traditional Chinese medicine, an intelligent tablet reading assistant diagnosis system including PET/CT and mammography plus pathological sections, and an intelligent stethoscope.
Aircraft Take-off and Landing Automatic Tracking System
The system provides all-round monitoring of aircraft landing and takeoff process, and realizes automatic video monitoring alarm for aircraft down angle deviation and landing movement safety warning by linking HD tracking system and laser rangefinder.
Intelligent Recognition Method Based on Visual Perception in Chip-Laminating Devices
Based on visual technology to achieve two-dimensional feature identification and detection of the inspection material; based on visual and other perception technology to achieve three-dimensional state identification of the material, and give inclination angle, etc.